
应用案例
UAV 3D 测绘 - Mid-40 与 M600 集成测绘惠州湾大桥
2019/4/24为了演示 Livox 激光雷达在 3D 测绘应用的巨大潜力,通过将 M600 和 Mid-40 进行集成,并对全长 3 公里的广东省惠州市的惠州湾大桥进行了测绘测试。
Livox 致力于为汽车、机器人、测绘等众多行业提供低成本、高性能激光雷达传感器。3D 激光雷达 Mid-40 现已发布,可立即供货,定价 3999 人民币,为机器人导航和地图测绘提供了高性价比的解决方案。Mid-40 关键参数如下:
表 1. Mid-40 基本参数
|
| |
|---|---|
| 激光波长 | 905 nm |
| 安全级别 | Class 1 (IEC60825-1) |
| 量程 (@ 100 klx Background) | 90 m @ 10% 反射率 130 m @ 20% 反射率 260 m @ 80% 反射率 |
| 距离精度 (1σ @ 25 m) | 2 cm |
| 角度精度 | < 0.1° |
| 视场(FOV) | 38.4° 圆形 |
| 数据率 | 100k points/s |
| 典型功率 | 10 W |
| 重量 | Approx. 710 g |
| 尺寸 | 88×69×76 mm |
| 工作温度 | -20˚C to 65˚C (-4˚F to 149˚F) |

图 1. 惠州湾大桥和点云测绘图

(a)
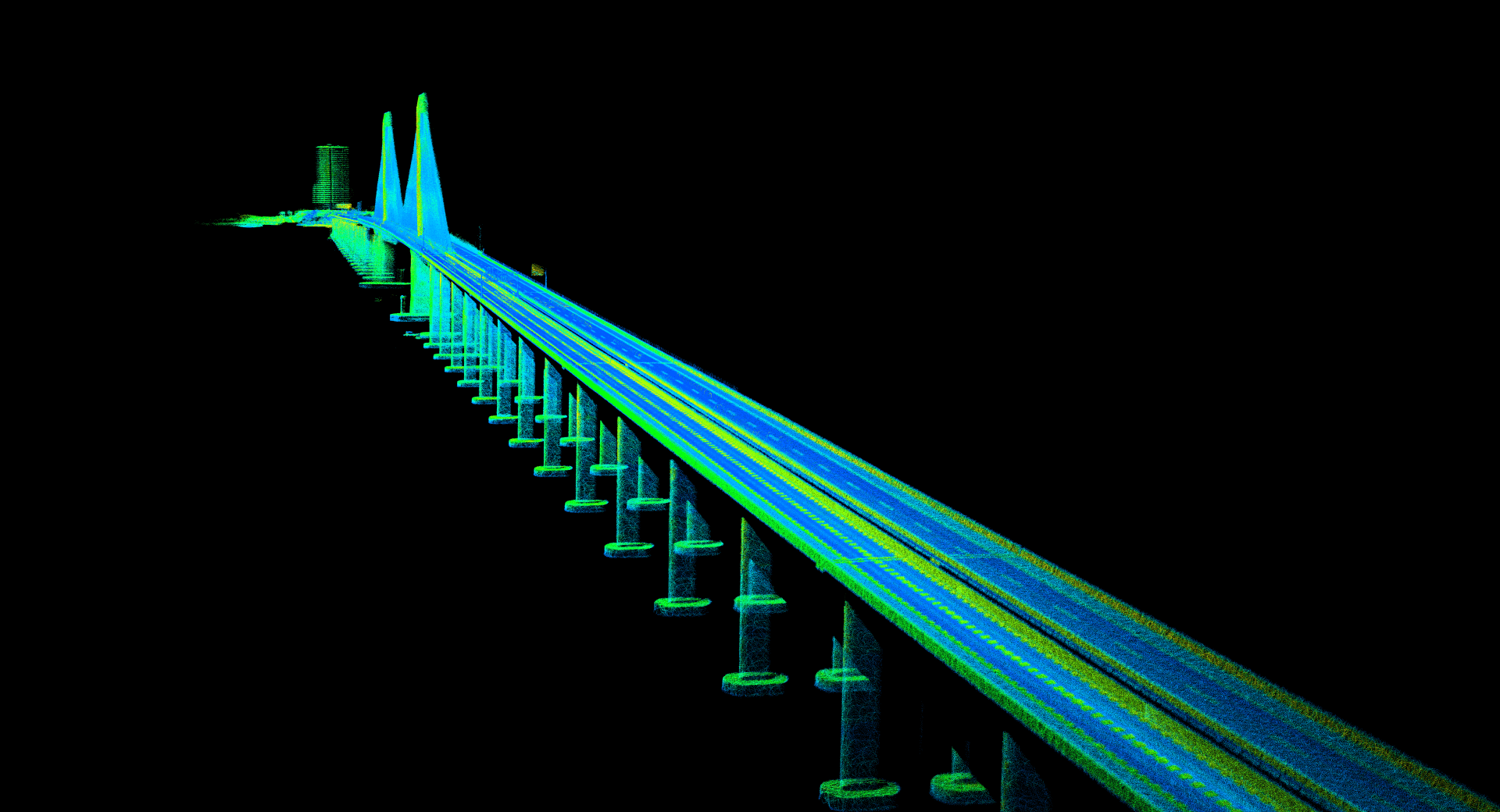
(b)
这次测试的详细过程如下:首先将一个 Livox MID-40 激光雷达、一个惯性导航系统(INS)以及一个来自 Inertial Sense (https://inertialsense.com/products/gnss-ins-rtk-sensors/)的 GNSS-INS 传感器(RTK)组合在一起,以进行高质量姿态测量。集成了 RTK 的 INS 传感器能提供厘米级定位服务。Livox Mid-40 和 INS 传感器牢固地连接在一起以避免产生任何相对运动。树莓派微型计算机用来实时处理 Mid-40 数据和 INS 测量结果。Livox 激光雷达支持外接 INS/RTK,以实现硬件级时间同步和软件级传感器数据融合。有关 Livox 激光雷达集成 INS/RTK 的具体步骤及数据处理的详细说明,请访问 https://github.com/Livox-SDK/LivoxIntegration。
图 2. 主要设备安装
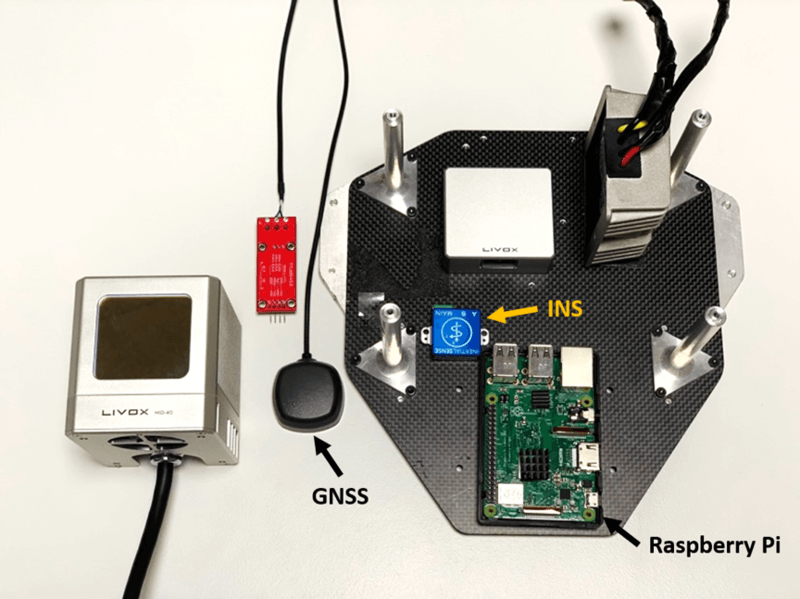
图 3. M600 + Mid-40的完整系统

制图过程中,无人机和桥梁之间的距离约为 50 米。更长的距离可能会降低点云精度,因为 INS 传感器的姿态测量误差会随距离增加。更高级的 INS(如 APX-20 和 NovAtel 的 SPAN)可支持更长的距离,数据收集也将变得更高效。因此,这其中所选用的 INS 扮演着非常关键的角色。在全长 3 公里的惠州湾大桥上,使用单个 Mid-40 进行的数据采集仅需半天时间,后期处理不到半小时。
所有激光雷达数据和 INS 测量(包括 RTK 测量)都保存在树莓派的 microSD 卡上。数据存储好之后,后期处理工作就非常轻松了,只需将 INS 传感器测量到的旋转和平移数据应用于激光雷达数据上,所有点云数据就会投到坐标系上,构建出全局地图。
无人机飞行期间,需通过惯性导航系统和 GPS 补偿激光雷达的旋转和平移等运动,具体原因如下。无人机飞行控制器内配有 IMU,但机内的阻尼隔振器会将 IMU 与机身(及激光雷达)隔离,以吸收螺旋桨旋转及各种飞行模式引起的振动。IMU 隔振固然能提供一定帮助,有时对无人机控制而言必不可少。但在传感器数据融合和制图等应用中,我们需要测量所有可能存在的激光雷达运动,这其中就包括振动。
测试中使用的是 DJI M600 无人机。Mid-40 的尺寸和重量也适用于 M200、M210(RTK)或推出不久的 M220 等机身更小的无人机。由于只有一台 M600,所以就用这个型号做测试。机械组装方面,Livox Mid-40 提供多种安装选项(参照 Livox Mid-40 快速入门指南),将 Livox Mid-40 集成到DJI M600的过程非常简单,各个机械部件也易于安装。电气硬件组装方面,使用 DC-DC 电压调节器将无人机电池电压(22 V)降至 Mid-40 输入电压范围(10V 至 16V)。树莓派的输入电压则直接来自无人机电池电压。
图 4. 桥梁点云测绘图
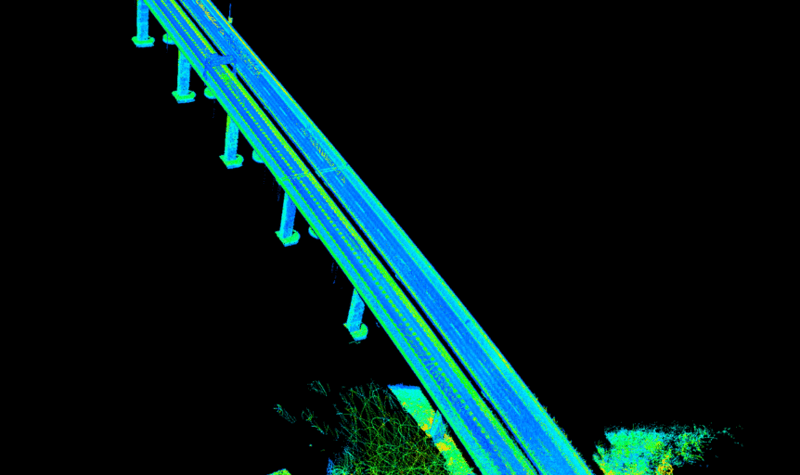
(a)
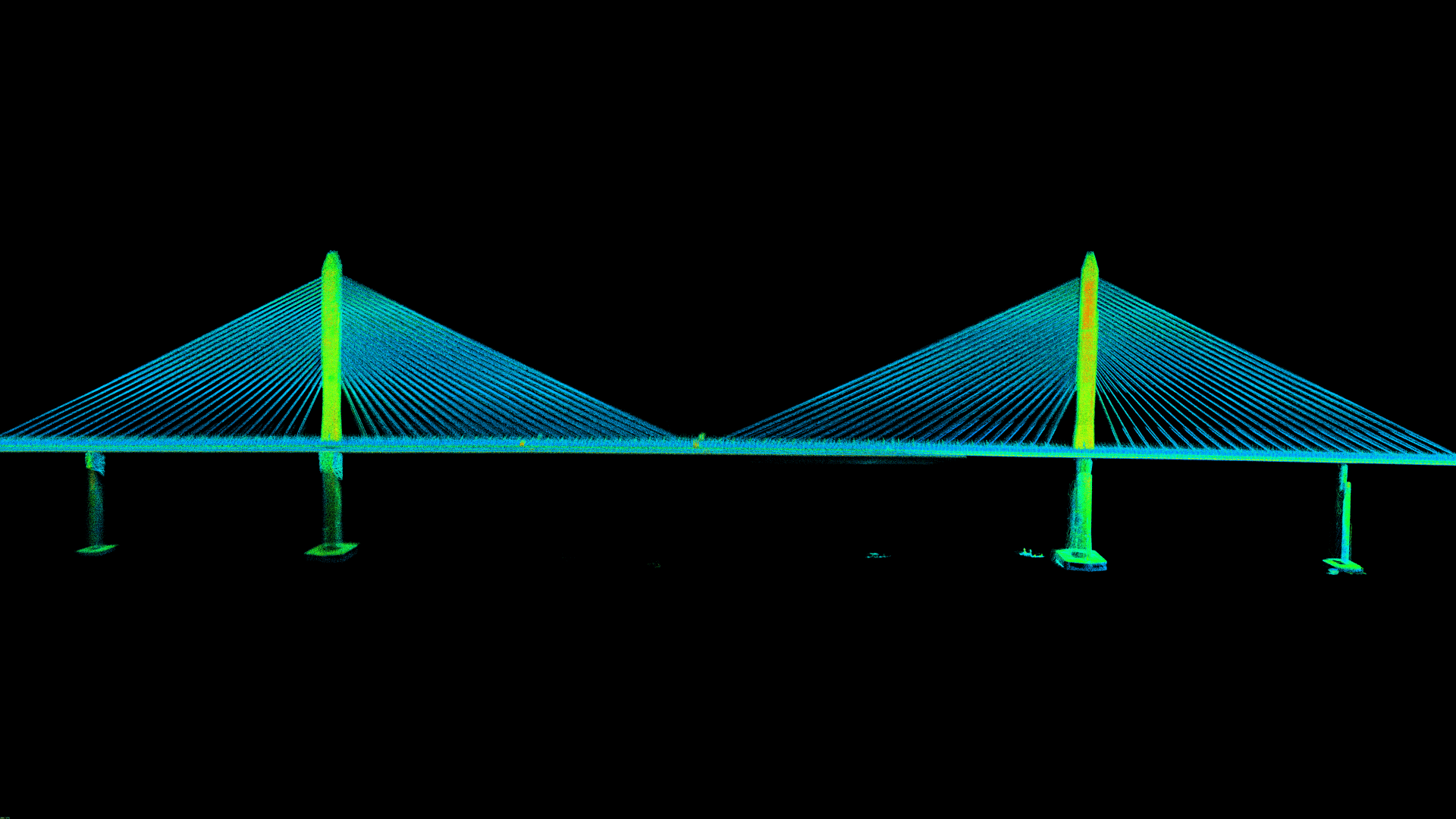
(b)
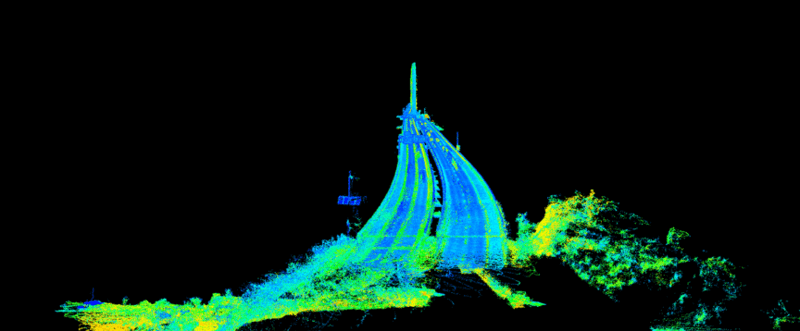
(c)
如图所示,能用 Mid-40 绘制出整个桥梁的细节。每条斜拉索都轮廓分明,桥面的标记也能清楚看到。Livox 激光雷达让航空测绘效率更高、成本更低。当然,开发人员和第三方解决方案供应商也能够尝试使用更高级的 INS 或更复杂的后期处理算法(如 SLAM),将制图精度提升到更高水平。
备注:此类项目已开源:https://github.com/Livox-SDK/livox_high_precision_mapping