





Showcase
Livox-Fallbeispiel - 3D-Kartierungen mit einer Drohne und LiDAR - die DJI M600 und der Livox Mid-40
2019/4/24Zur Darstellung des enormen Potentials in der 3D-Kartierung durch Livox LiDAR, zeigen wir Ihnen wie der Sensor in eine Drohnenlösung integriert werden kann. Zum Test kartierten wir die drei Kilometer lange „Huizhou Bay Bridge“ in der südchinesischen Provinz Guangdong, nahe Hong Kong.
Livox hat sich preiswerten leistungsstarken LiDAR-Sensoren verschrieben, welche sich in einer Reihe an Branchen (Automotive, Robotik, Vermessung) einsetzen lassen. Mit der Vorstellung des Mid-40, einem leistungsstarken LiDAR-Sensor für 599 €, erreicht die LiDAR-Technologie kostengünstig Einsatzzwecke in der Robotiknavigation und Kartierung. Die Schlüsselspezifikationen des Mid-40 finden Sie unter: https://www.livoxtech.com/mid-40-and-mid-100/specs Ausgewählte technische Daten finden Sie in Tabelle 1.
Tabelle 1: Technische Daten zum Mid-40.
|
| |
|---|---|
| Laserwellenlänge | 905 nm |
| Laserklasse | 1 (nach IEC/EN 60825-1:2014) |
| Erfassungsreichweite (bei 100.000 Lux) | 90 m (bei 10 % Remission) 130 m (bei 20 % Remission) 260 m (bei 80 % Remission) |
| Präzision der Entfernungsmessung (1σ bei 20 m) | 2 cm |
| Genauigkeit in der Winkelmessung | < 0,1° |
| Sichtfeld (FOV) | 38,4° kreisförmig |
| Datenrate | 100.000 Punkte/s |
| Nennleistung | 10 W |
| Gewicht | Etwa 710 g |
| Abmessungen | 88 × 69 × 76 mm |

| Betriebstemperatur | -20 °C bis +65 °C |
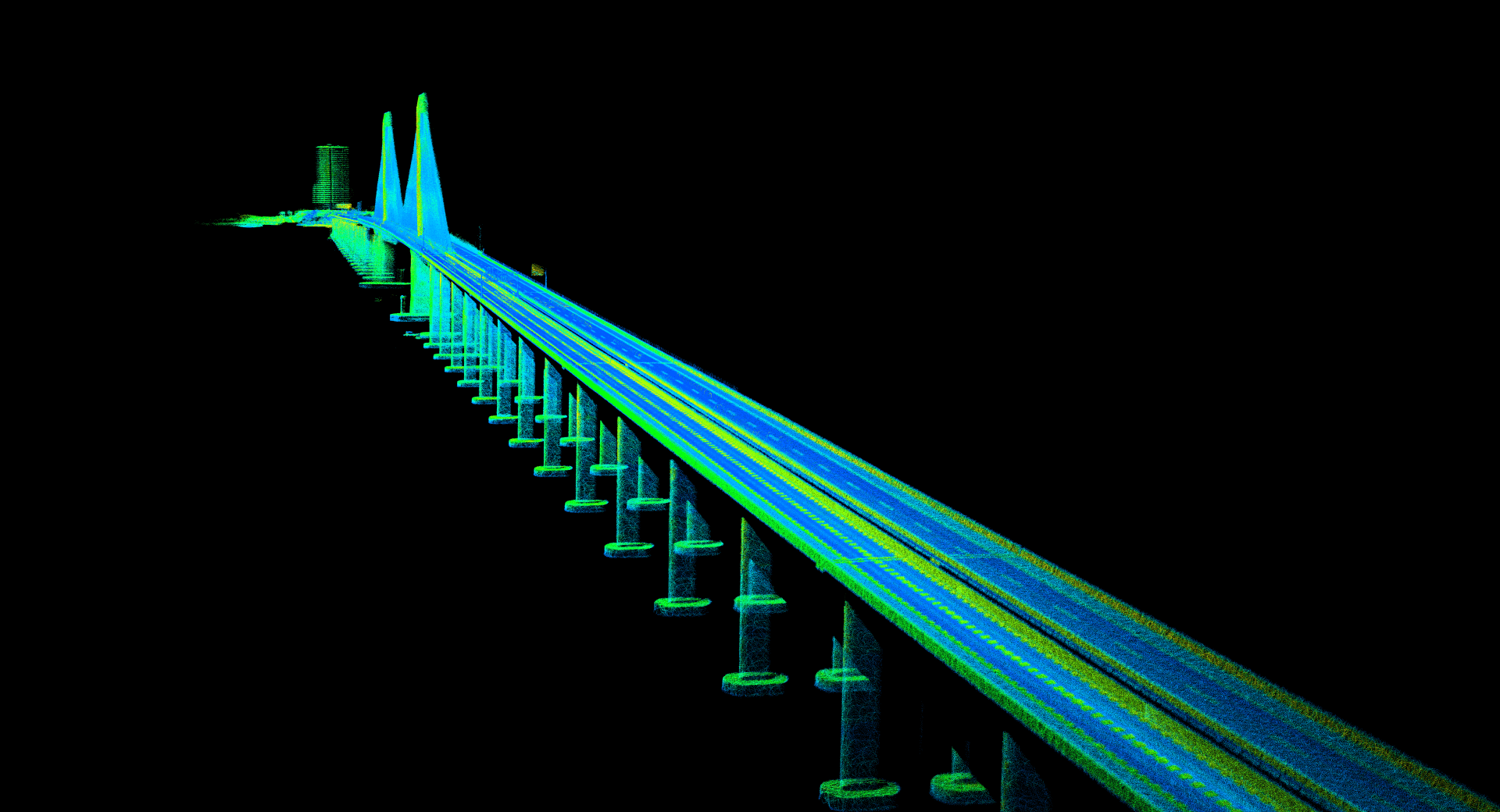
Zur Darstellung des enormen Potentials in der 3D-Kartierung durch Livox LiDAR, zeigen wir Ihnen wie der Sensor in eine Drohnenlösung integriert werden kann. Zum Test kartierten wir die drei Kilometer lange „Huizhou Bay Bridge“ in der südchinesischen Provinz Guangdong, nahe Hong Kong. Das Ergebnis der Kartierung sehen sie hier:
Abbildung 1: Die „Huizhou Bay Bridge“ und die aufgenommene Punktwolke in gemeinsamer Darstellung.

(a)
(b)
Wir beginnen mit der Integration des Livox Mid-40 an einem GNSS-INS-Sensor von „Inertial Sense“ (https://inertialsense.com/products/gnss-ins-rtk-sensors/), der uns mit hervorragenden Fluglagedaten versorgt. Ein RTK-Modul liefert mit dem INS-Sensor zentimetergenaue Positionierung. Der Livox Mid-40 und der INS-Sensor werden sicher befestigt, um jegliche relative Bewegungen zu vermeiden. Ein „Raspberry Pi“-Mikrocomputer verarbeitet die Daten des Mid-40 und des INS-Sensors in Echtzeit. Die LiDAR-Sensoren von Livox unterstützen externe INS/RTK-Sensoren sowohl mit Zeitsynchronisierung auf Hardwareebene, als auch durch Sensordatenfusion auf Softwareebene. Detaillierte Hinweise zur Integration und Datenverarbeitung von Livox LiDAR-Sensoren mit INS- und RTK-Sensoren finden Sie unter: https://github.com/Livox-SDK/LivoxIntegration.
Abbildung 2: Die Hauptkomponenten des Aufbaus.
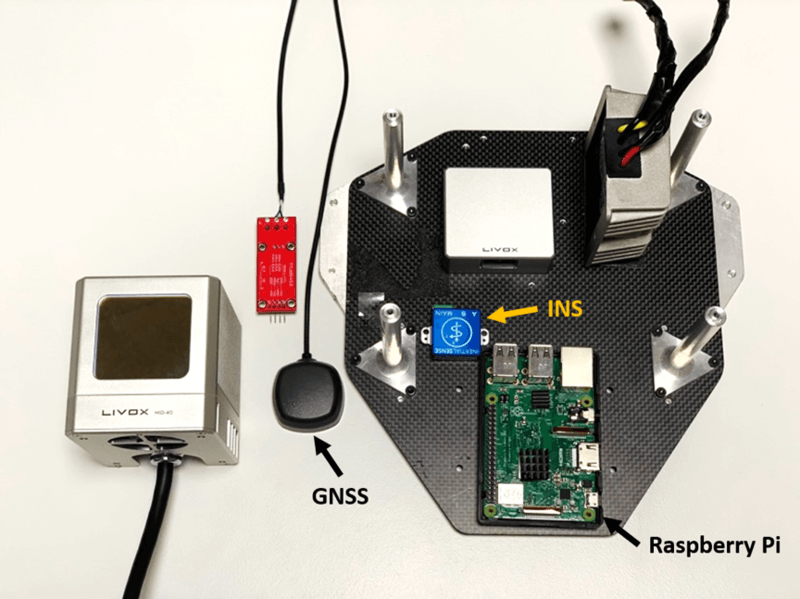
Abbildung 3: Mid-40 und DJI M600 Drohne.

INS und GNSS sind nötig, um die Verschiebung und Rotation der LiDAR-Bewegungen während des Fluges zu kompensieren. Die Drohne selbst ist zwar mit einem IMU-Sensor im Flugregler ausgestattet, dieser ist jedoch zur Absorbierung von Vibrationen vom Flugrahmen entkoppelt, damit die Vibrationen sich nicht auf die Messwerte auswirken. Daher sind die Messwerte auch unabhängig von den tatsächlichen Bewegungen des LiDAR-Sensors. Für die Steuerung der Drohne ist diese Entkoppelung jedoch sinnvoll und häufig notwendig. Zum Zweck der Sensordatenfusion und der Kartierung müssen jedoch alle erdenklichen LiDAR-Bewegungen, samt der Vibrationen, erfasst werden.
Für unser Beispiel nutzten wir eine industrielle Drohne von DJI, die M600. Aufgrund der geringen Maße des Mid-40, könnte der Aufbau auch an einer kleineren Drohne, wie der DJI M200 Serie oder einer anderen industriell erweiterbaren Drohne angebracht werden. Die Befestigung wird durch die Zahlreichen Montagebohrungen am Livox Mid-40 erleichtert (siehe Livox Mid-40 Betriebsanleitung (Kurzfassung), somit ist die Integration an der M600 mit wenigen Bauteilen schnell erreicht. Für die elektrische Einbindung nutzen wir einen Gleichspannungswandler, damit der Drohnenakku mit 22 Volt den Livox Mid-40-Sensor mit 10 bis 16 Volt und den Raspberry Pi mit 5 Volt versorgen kann.
Während der Befliegung hielten wir den durch den INS-Sensor vorgegebenen Maximalabstand zwischen Drohne und Brücke von 50 Metern ein. Ein größerer Abstand würde die Punktwolkengenauigkeit reduzieren, da aufgrund des zunehmenden Abstands die Fehlertoleranz des INS-Sensors zu größeren Abweichungen in der relativen Lage der gemessenen Punkte führt. Mit einem noch höherwertigen INS-Sensor (z.B. Applanix APX-20 oder NovAtel's SPAN®) ließe sich der Abstand weiter erhöhen und somit insgesamt beschleunigen. Für die Erfassung der „Huizhou Bay Bridge“ benötigten wir einen halben Arbeitstag mit einem einzelnen Mid-40. Die Nachbearbeitung nahm lediglich eine halbe Stunde in Anspruch.
Alle LiDAR-, INS- und RTK-Daten werden auf die im Raspberry Pi eingesteckte microSD-Karte geschrieben. Auf die LiDAR-Daten werden in der Nachbearbeitung lediglich die INS-Sensordaten zur Verschiebung und Rotation angewandt, damit sich alle Punkte in einem globalen Koordinatensystem befinden.
Abbildung 4: Bilderreihe zur Kartieren Brücke.
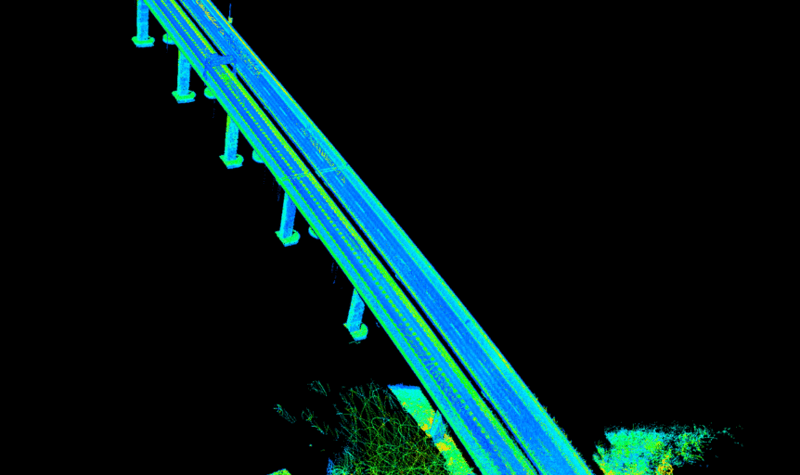
(a)
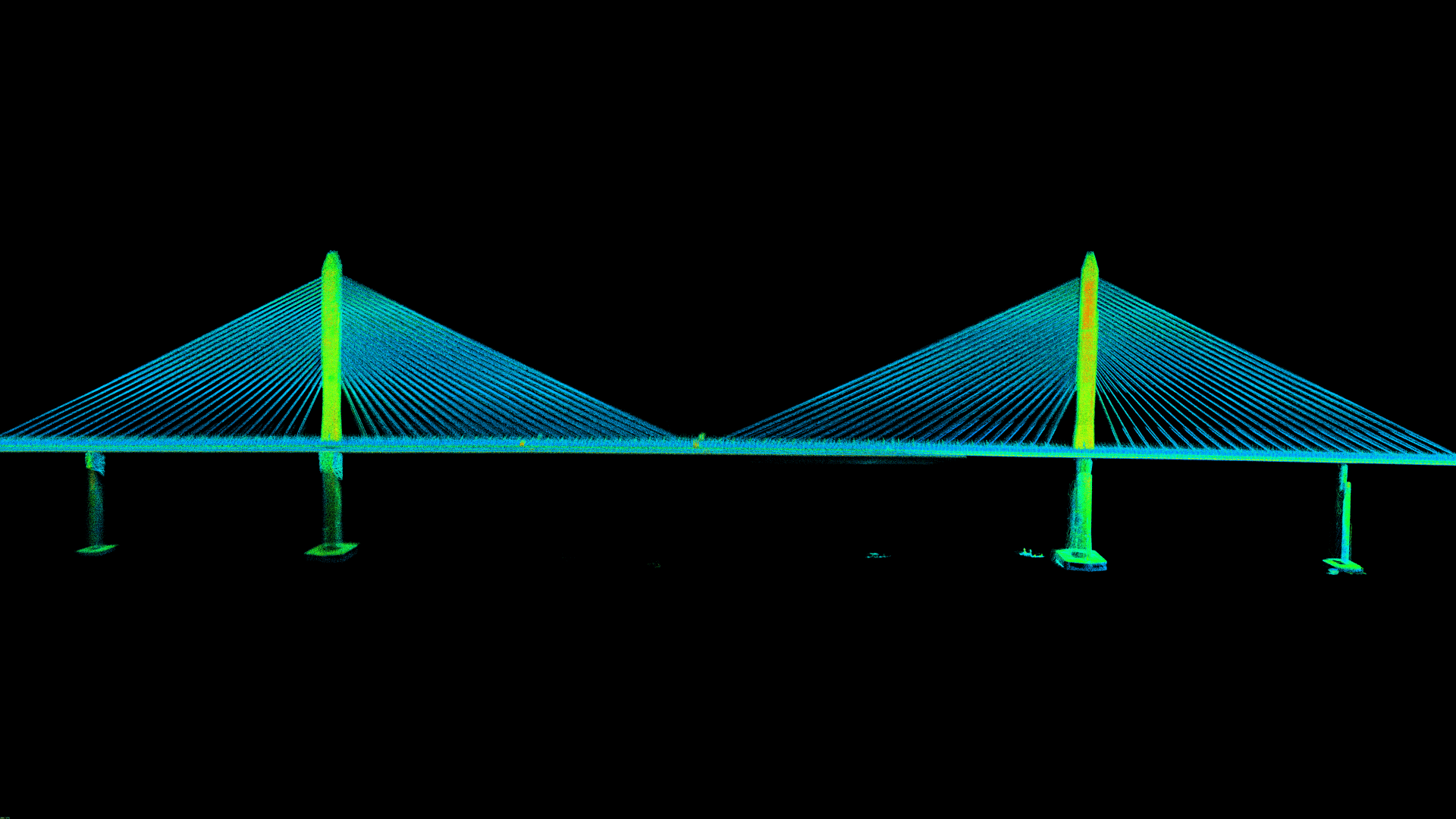
(b)
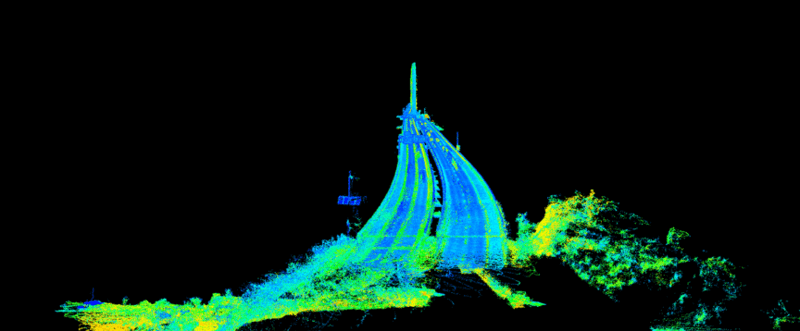
(c)
Wie in Abbildung 4 dargestellt, könnten wir die gesamte Brücke detailliert, mit nur einen Mid-40 Sensor erfassen. Die Schrägseile werden voneinander getrennt dargestellt und die Fahrbahnmarkierungen sind ebenfalls deutlich sichtbar. Mit den LiDAR-Sensoren von Livox ist die Luftbildkartierung kostengünstiger und effizienter als je zuvor. Die in diesem Beispiel dargestellten Ergebnisse könnten durch Nutzung anderer Hardware, etwa eines noch höherwertigen INS-Sensors oder umfangreicherer Nachbearbeitung (z.B. Simultaneous localization and mapping; SLAM oder herstellerspezifische Lösungen), weiter verbessert werden. Es zeigt jedoch das Potential, welche Möglichkeiten durch die Nutzung der Livox LiDAR-Sensoren eröffnet werden.